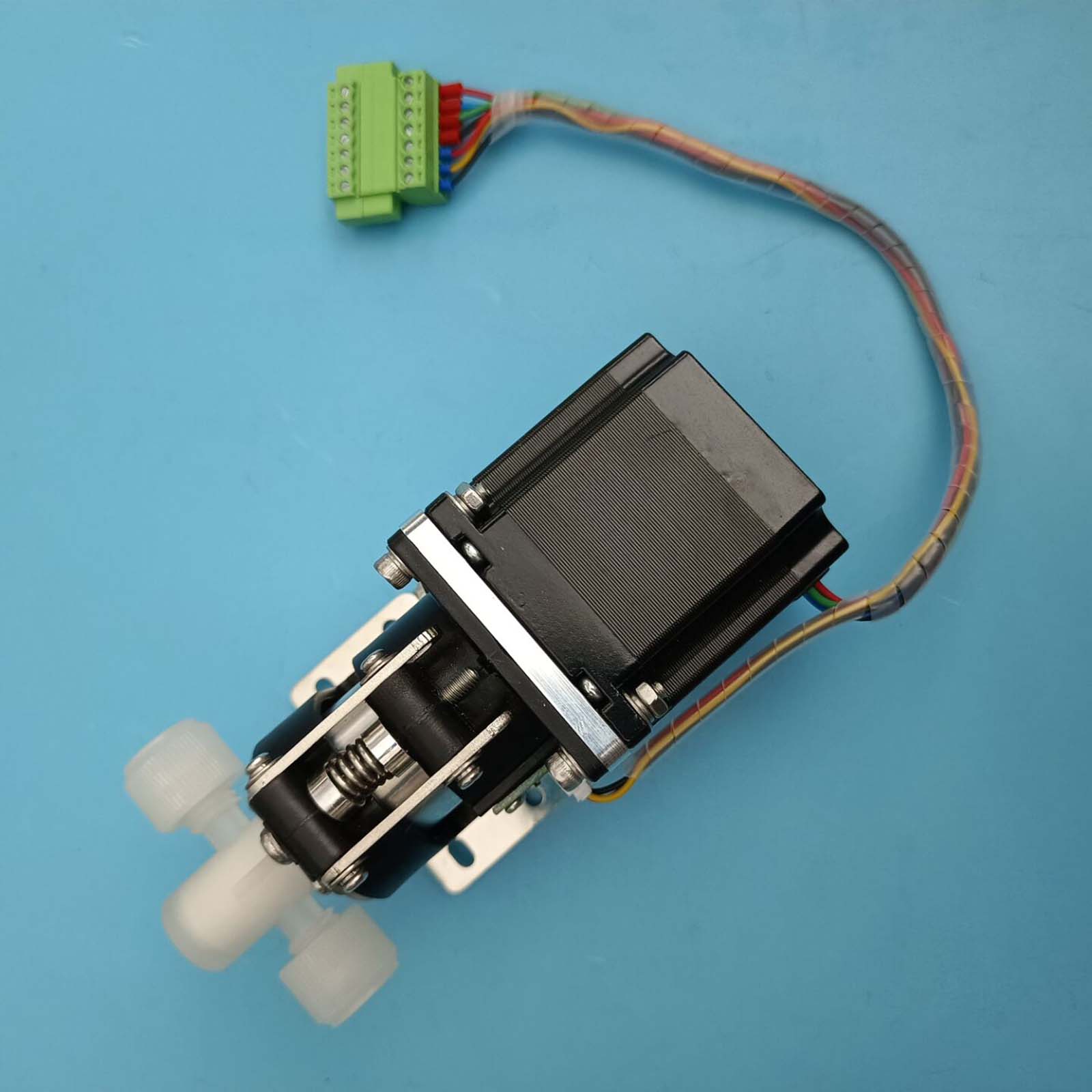
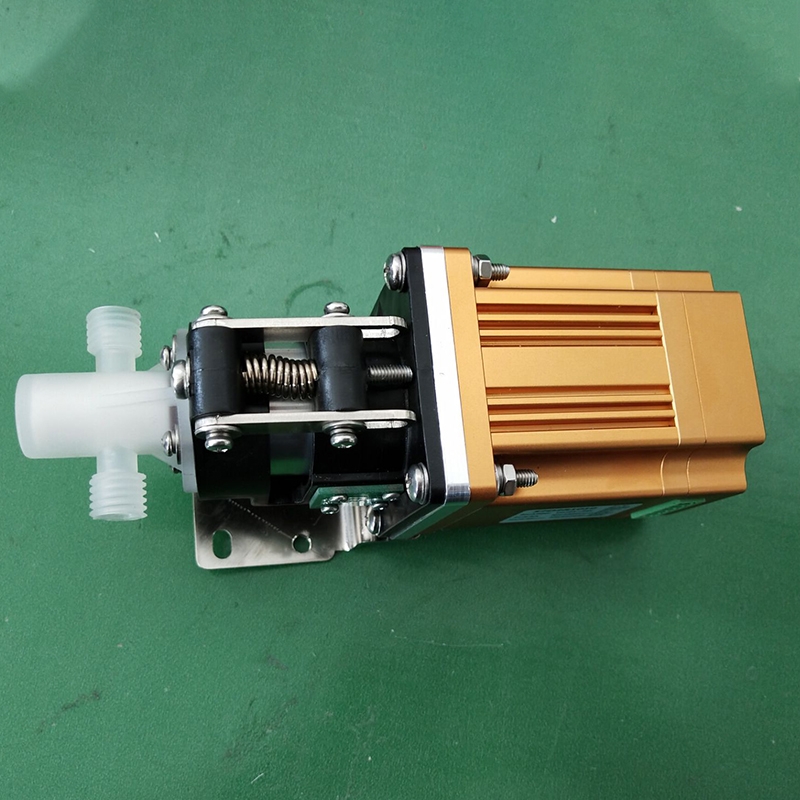
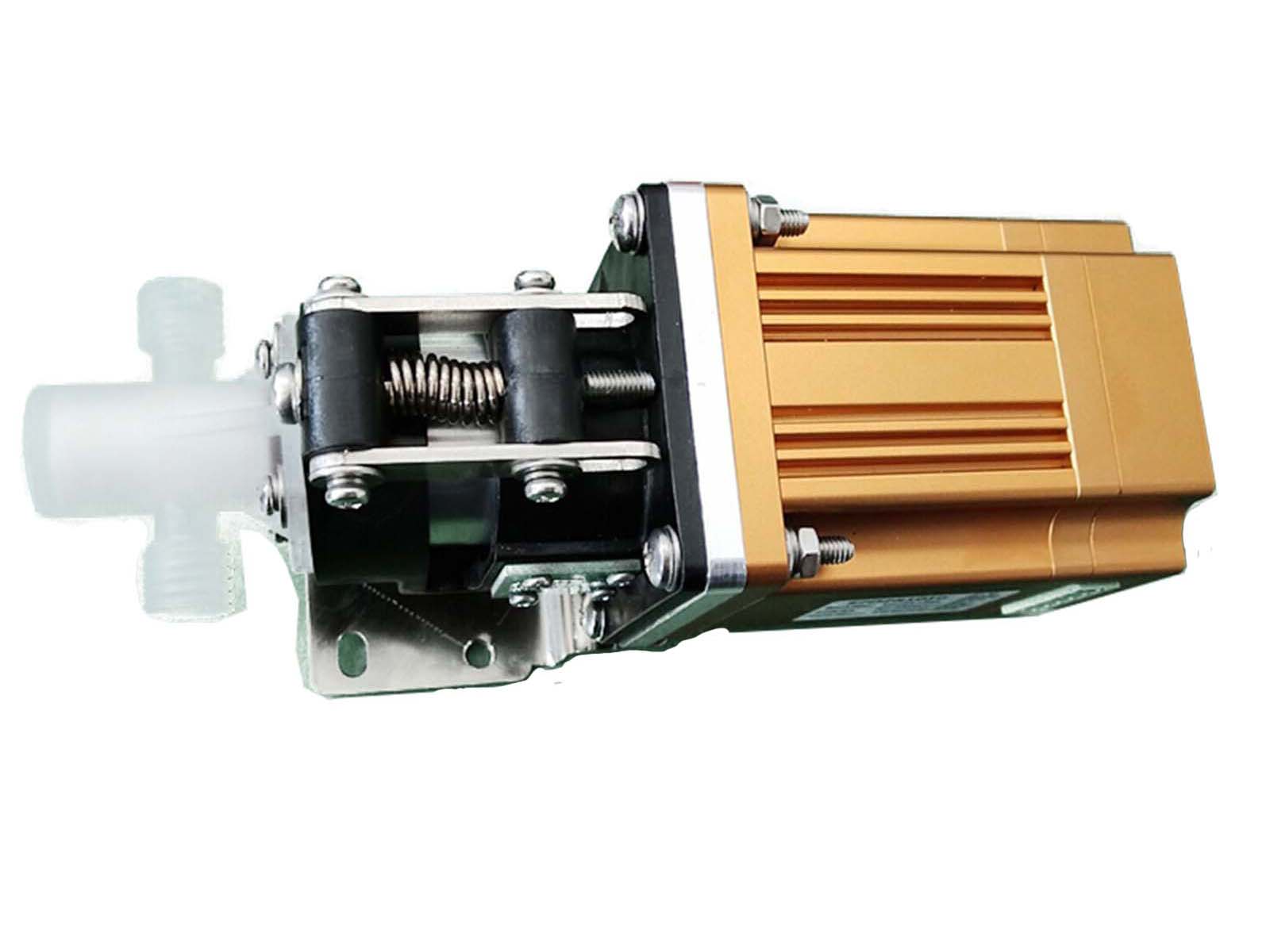
CP series rotary ceramic plunger pump is a kind of micro plunger pump with our own patented technology. It is precisely matched with ceramic outer shell and ceramic inner rod,
and performs reciprocating and rotating motion to realize the operation and delivery of liquid flow; , high temperature resistance, not easy to wear and other characteristics,
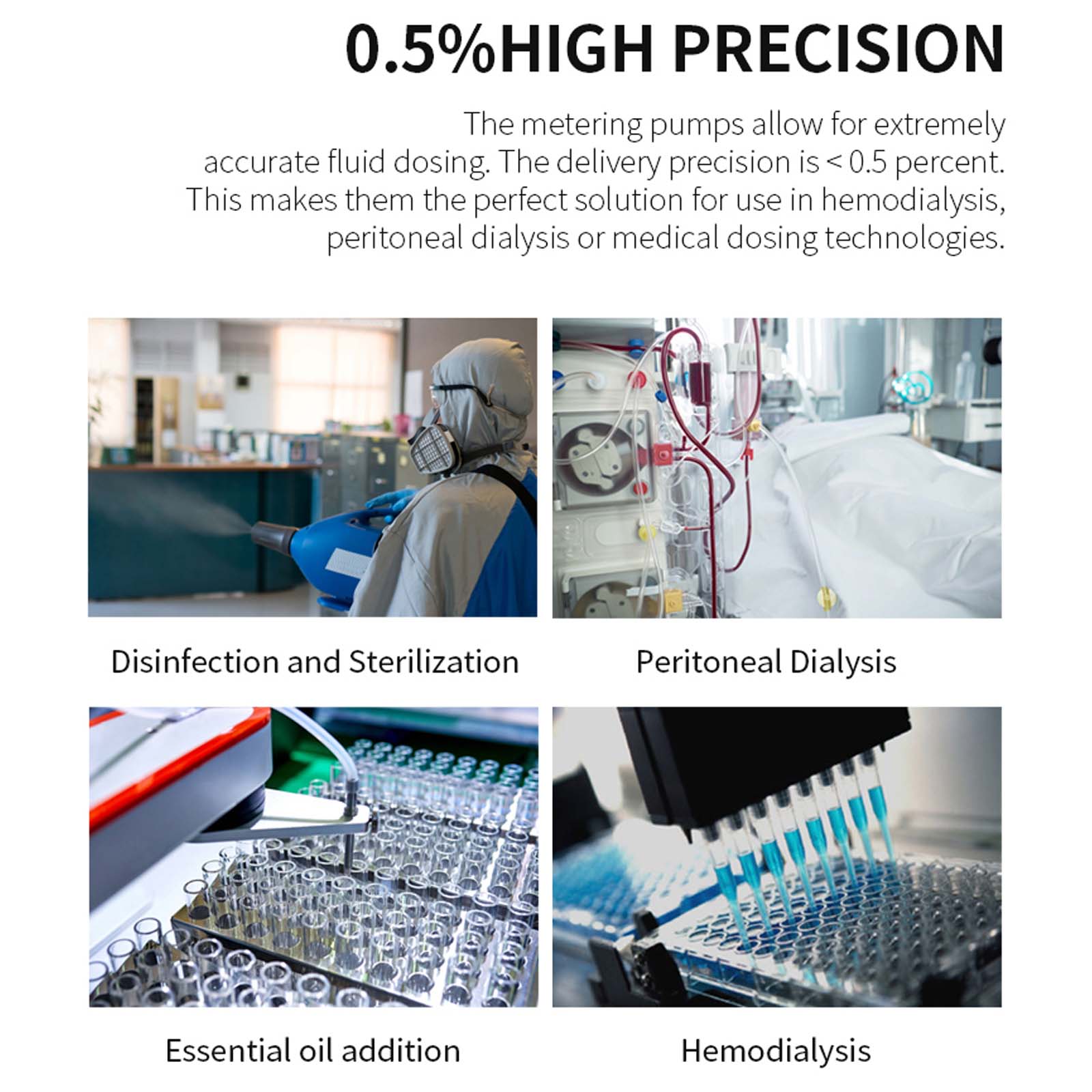
it is widely used in medical, chemical, scientific research, food processing and other industries.
Technical parameters:
1. Rated pressure: ≥0.2MPa
2. Flow: 0-20ml/min (adjustable), repeatability: ≤0.2%
3. Voltage: DC 24V, Power: 12W
4. Working temperature ≤100℃
5. Use medium: acid, alkali, salt, organic solvent, oil at room temperature
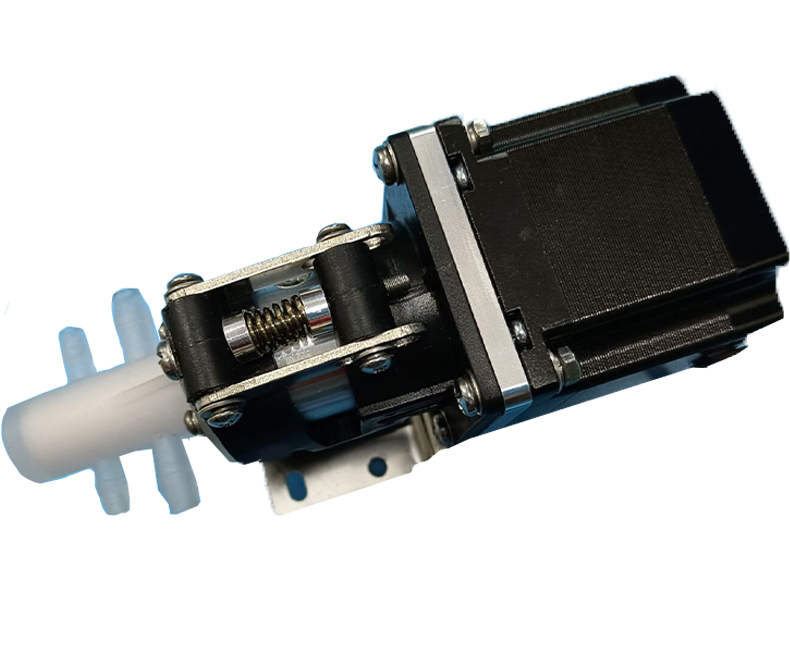
6. Driving mode: stepping motor, stepping angle 1.8°
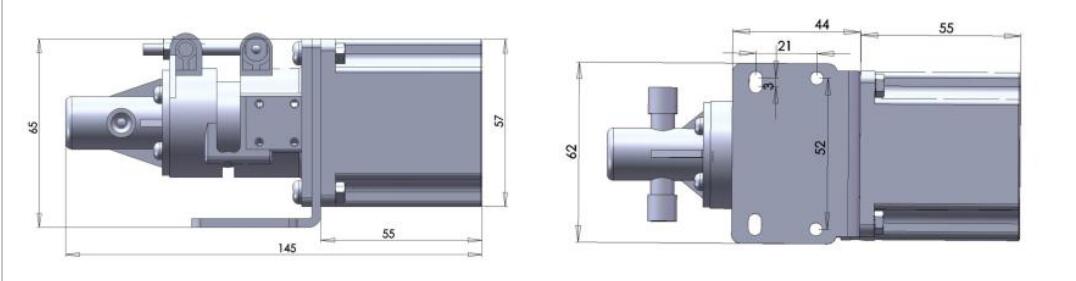
7. Installation size: 145mm×65mm×57mm
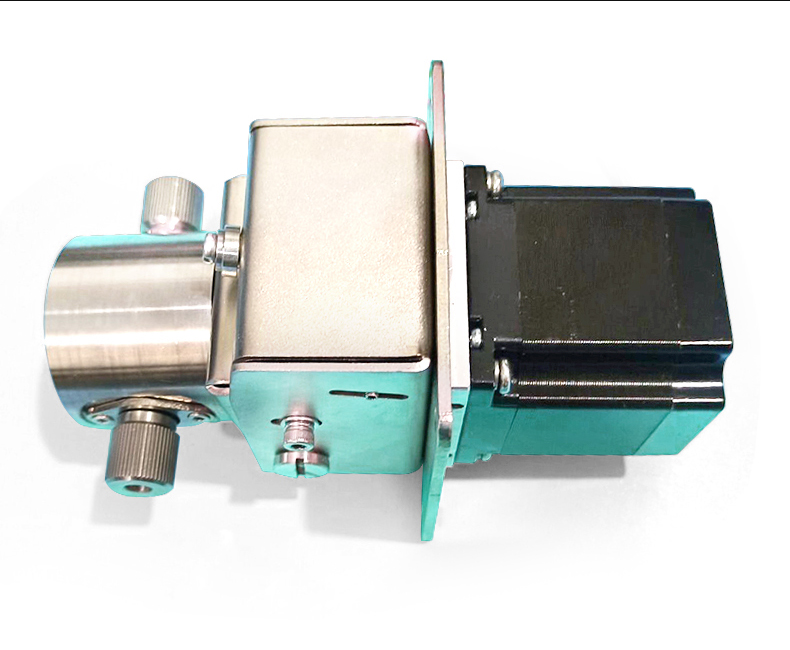
Structure and installation dimensions
In order to obtain high flow accuracy, please install the product vertically as
shown in the figure, and select the end of the fluid inlet lower than the outlet.
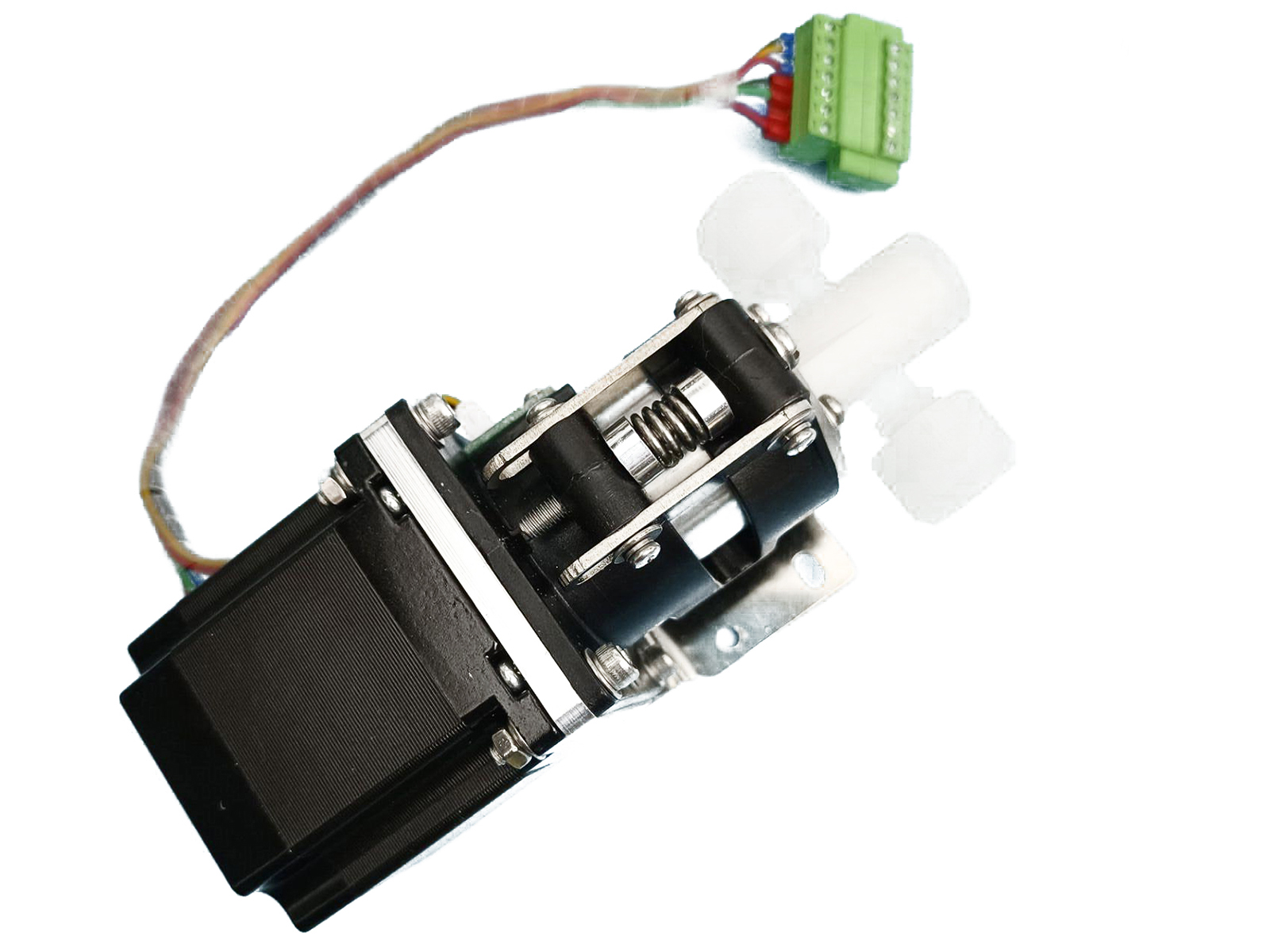
Speed feedback or position detection
CP series rotary ceramic plunger pumps are equipped with speed
measurement feedback or position detection signal board, VCC=+5V as
shown in the figure:
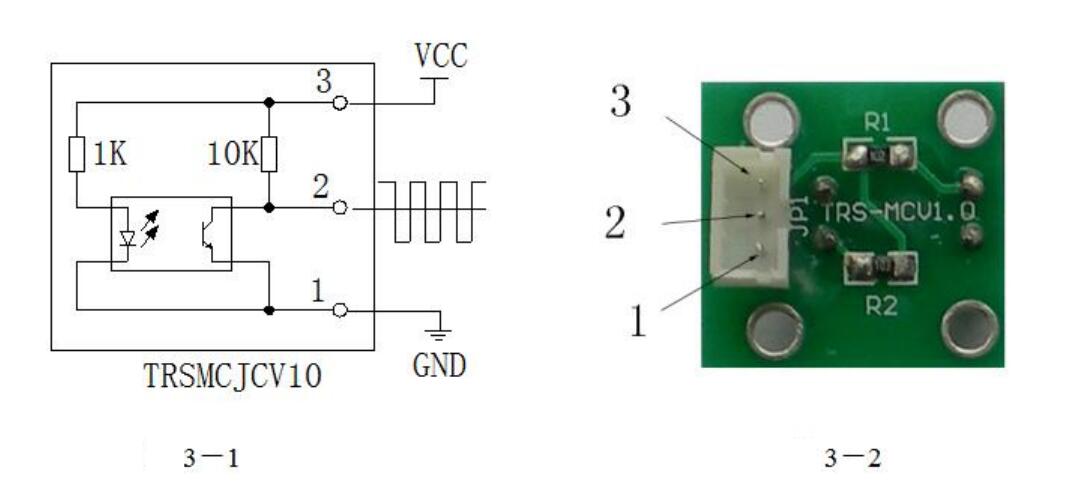
The tachometer turntable configured by the user for speed measurement
feedback can detect 10 pulses per revolution
The turntable configured by the user for the detection of the starting position of
the suction, detects one pulse per revolution,
Driver (optional)
TRS series rotary ceramic plunger pump adopts the latest 32-bit DSP
technology stepper motor driver, the user can set any subdivision within 512
and any current value within the rated current, which can meet the application
needs of most occasions. Due to the built-in micro-segmentation technology,
even under low-segmentation conditions, it can achieve the effect of
high-segmentation, low, medium and high-speed operation is very stable, and
the noise is ultra-low. The driver integrates the parameter automatic tuning
function, which can automatically generate the optimal operating parameters
for different motors and maximize the performance of the motor.
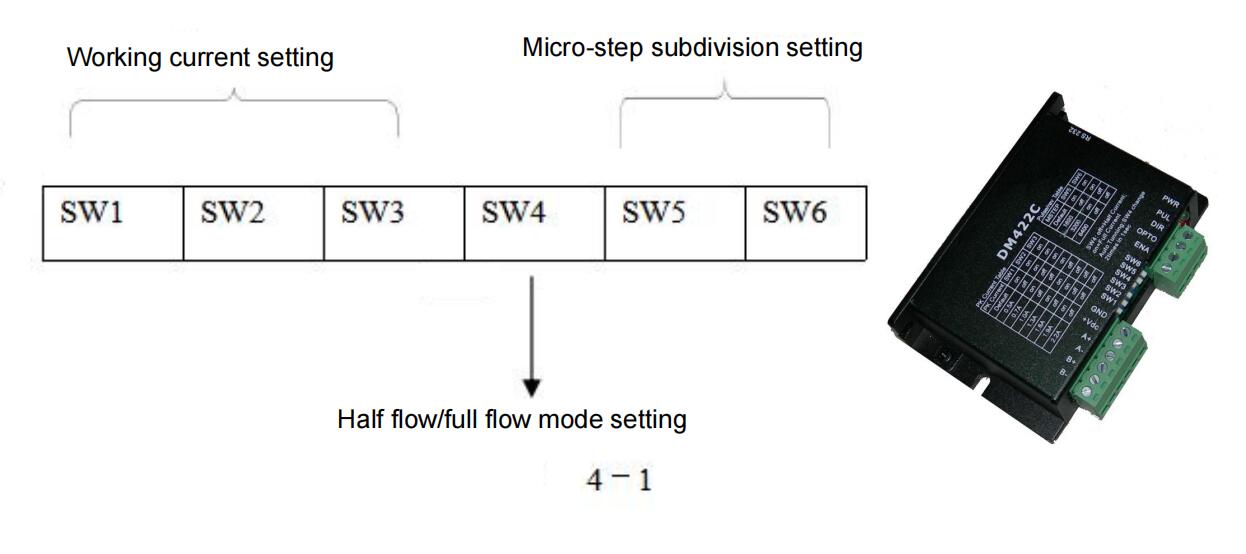
1. Driver function description
The DM422C driver uses a six-position DIP switch to set the subdivision
accuracy, dynamic current and half current/full current. The detailed
description is as follows:
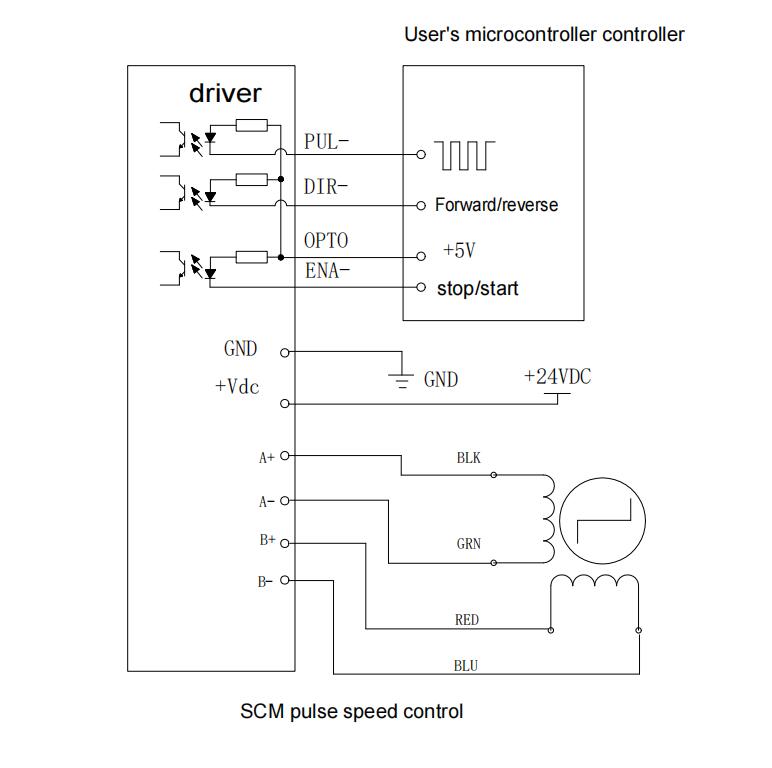
SCM pulse control mode
When the control signal voltage provided by the controller is greater than 5V,
the signal line needs to be connected in series with a current limiting resistor.
When the control signal voltage is 12V, a 1K 1/4W resistor needs to be
connected in series; when the control signal voltage is 24V, a 2K 1/4 resistor
needs to be connected in series.
In order to avoid malfunction and deviation, PUL, DIR and ENA should meet
certain control timing requirements, as shown in the following figure: